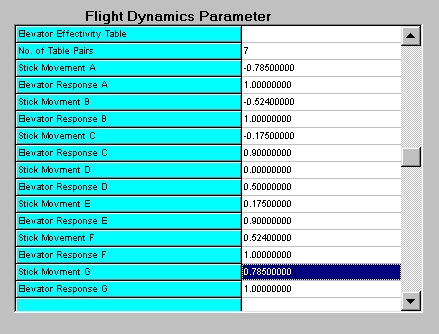
第4章:機体姿勢のコントロールさて、続いては機体の姿勢をコントロールするピッチ、ロール、ヨーについての特性を設定します。.air ファイルの中でももっともわかりづらい個所です。機体姿勢のコントロールはジョイスティックの操作量にも関連しています。エントリーの値を変更すると何が起こるかは説明できるのですが、その正体は不明なものが多いです。このチュートリアルで触れた内容はすべて、各エントリーを実際に変更してみて、機体特性の変化を観察し、エントリーの意味するところをおおよそ見当をつけ、確認実験をし、再度エントリーを変更し…といった、試行錯誤の繰り返しによって得られたものです。特に、セクション320については今のところ、詳細が不明なエントリーが多くあります。おそらく、ピッチ、ロール、ヨーについての寸法と配置についてのエントリーであると思われます。そんなわけで、このセクションについては、機体の大きさがほぼ同じ他の機体からエントリーの値を流用するのが一番良いと申し上げておきましょう。たとえば B-747 を作成しているのであれば、B-737 のエントリーから値を流用し、機体サイズの比率をかけてやります。 エレベーターの操作とピッチ: セクション1101、Main Dynamics のなかにはエレベーターをコントロールしているエントリーが3つあります。まず Pitch Stability Factor2 エントリーが、機体のピッチ変化に対する安定性を定義しています。すでに述べたとおり、エントリーの値が小さいほど安定性が高くなり、ピッチ変化がしにくくなります。2番目のエントリーは Pitch Damper エントリーです。Damper とは機体の振動を吸収するための機能です。このエントリーの値を大きくすると、たとえば旋回の後、機体が振動しなくなります。Pitch Stability と Pitch Damper の違いは、前者が加速度に関係しているのに対し、後者が速度に関係している点です。たとえば、機体が旋回の途中ではなく、開始直後に失速するようならば、機体を旋回させる加速度が高すぎる、つまり不安定であるわけですから、Pitch Stability Factor の値を大きくしてください。逆に機体が硬直したような飛び方をするならば、Pitch Damper の値を小さくしてください。一般的に、大型機では Pitch Damper の値が高く、小型機では逆に低くなります。 さて、すべての機体姿勢のコントロールはジョイスティックを通して行われます。ジョイスティックを操作した量に対する、エレベーターの効き具合を決定するのがセクション1101、Elevator Control Factor エントリーと、セクション341、Elevator Effectivity Table セクションです。Elevator Control Factor エントリーには、エレベーターが発生することのできる最大の力が設定されています。Elevator Effectivity Table セクションではジョイスティックを動かした量と、ゲーム中でのエレベーターの動作量の対応が設定されています。Elevator Control Factor エントリーの値と、Elevator Effectivity Table セクションで決まる倍率をかけ合わせると、ジョイスティックの操作量に対する、エレベーターの力が算出できる仕組みです。 わかりにくいと思いますので実例を紹介しておきましょう。図はスピットファイア Mk.IX に関する設定です。CFS ではこのセクションに Stick Movement A~G、Elevator Response A~G のそれぞれ7つのエントリーがあります。各 Stick Movement エントリーがジョイスティックを操作した量、Elevator Response エントリーが各 Stick Movement エントリーに対応した倍率に対応します。
ごらんの通り、Stick Movement エントリーと Elevator Response エントリーは対になっています。ゲーム中で、ジョイスティックの移動量は-1から1の範囲で数値化されています。たとえばジョイスティックを前に 10% 倒した場合、移動量は 0.1 になります。この入力には Stick Movement E が対応します。Stick Movement E と対になるのは Elevator Responce E エントリーで、値は 0.9 です。よって、ゲーム中でエレベータにより発生する力は、ジョイスティックの入力値に Elevator Responce E エントリーの値と、前述の Elevator Control Factor エントリーの値をかけあわせたものになります。スピットファイア Mk. IX の Elevator Control Factor エントリーの値は -1200 ですので、ジョイスティックを前に 10% 倒した場合のエレベーターにより発生する力は 0.1 x 0.9 x -1200 = -108 となります。なぜこのような複雑な設定が必要なのでしょうか?実際に CFS 標準の P-51D の .air ファイルを除いてみてください。設定を解読すると、P-51D のエレベーターは左旋回の時の方が効率がよい、つまり、右旋回よりも左旋回のほうが速い事がわかります。またこのセクションは失速直前のジョイスティックの効き具合を調整するのにも使えます。 エルロンの操作とロール: 機体のロール動作とエルロン操作はセクション1101、Main Dynamics のなかの Roll Center、Roll Stability Factor 1 そして Aileron Control Factor の3つのエントリーで定義されています。Roll Center エントリーは全長方向のロールの中心軸を指定します。単位はインチで、これまでと同様に CoG からの相対的な位置を設定してください。私はこのエントリーはいつも0にしています。このエントリーを、たとえば10に設定すると、全体として飛行特性の設定が非常に複雑になってきます。興味のある方は試してみてください。 Roll Stability Factor 1 エントリーはロール中の安定性を設定します。エントリーの値が小さいほど安定性が高くなり、ロールの加速が高くなります。 Aileron Controll Factor エントリーは機体のロールの速さを決定します。このエントリーの値が小さいほど、ロールが速くなります。。 エルロンの動作量とジョイスティックの操作量についての設定は、エレベーターの動作量に関する設定と同じです。セクション342、Aileron EffectivityTable セクションにジョイスティックの入力値と、エルロンの動作量の対応が設定されていますので、先ほどの例を参考にして設定してください。Aileron EffectivityTable セクションから求まる倍率と、Aileron Controll Factor エントリーの値をかけたのがロールの速さを決定するのも、先ほどと同様です。 ラダーの操作とヨー: ラダーの発生する力の最大値は Rudder Congrol Factor エントリーで設定されています。前述のエレベーターとエルロンに関する設定の仕方とは逆に、エントリーの値が大きいほどラダーにより発生する力が大きくなります。ラダーの動作量とジョイスティックの操作量についての設定は、エレベーターの動作量に関する設定と同じです。セクション343、Rudder EffectivityTable セクションにジョイスティックの入力値と、ラダーの動作量の対応が設定されています。 Yaw Slide Factor エントリーはとても面白いエントリーです。このエントリーは、機体をバンクさせたときに横滑りを起こすかどうかを決定しています。Me262 は低速で旋回中に横滑りを起こす癖があったと伝えられていますので、この値を 213 と小さくしてみました。同時に着陸が難しい機体になりました。 Yaw Stability Factor 3 エントリーは垂直軸に対する回転の安定性を定義しています。このエントリーの値が高いほど、機体は安定します。逆に値が低いと、高速飛行時に振動が発生します。Me262 は高速飛行時に 1Hz の振動を起こすことが知られていますのでいろいろ試してみました。その結果 55000 の設定で 720 キロメートル/時から、57000 で760 キロメートル/時から振動が起こりました。このエントリーは非常に敏感ですが、私の実例を参考に設定してみてください。 Yaw Center エントリーは垂直回転軸の中心を設定するエントリーで、ヨー特性に大きな影響を与えます。このエントリーが正の値であれば CoG よりも機首寄り、負の値であれば CoG よりも尾翼寄りになります。 ヨーダンパーに関する設定: セクション1202、Yaw Damper エントリーは機体の飛行特性には影響を及ぼしません。Yaw Damper は現代の航空機が装備している機能で、FS98/CFS では計器飛行かオートパイロットで制御されます。
Introduction to Flight Dynamics ご意見、お問い合わせはこちらまで |